

-
 alex4anp,
alex4anp,
- 2730
Гоночный квадрокоптер Walkera Runner 250


|
|
Продают его многие магазины, но так как у меня уже сложились хорошие отношения с магазином GearBest, заказал там.
Заказ пришел довольно быстро, порядка 20 дней, курьерская служба CDEK в очередной раз порадовала, SMS уведомления и доставка в удобное время и место, не может не радовать.
Распаковка
Упаковка слабенькая, всего лишь пакетик. Очень жаль, что упаковщики магазина экономят на дополнительной коробке.

В результате коробка малость помятая, хоть и доставлялась курьерской службой. При наличии дополнительной упаковочной коробки впечатление от полученного товара было бы на +5, а так на -4.

Дополнительные виды товара



Внутри самой коробки организованно аккуратное хранилище. По сути ее можно использовать для хранения и транспортировки в дальнейшем.

Квадрокоптер, аппаратура и комплектующие, уложены в специально сформованные места из вспененного полиэтилена.

В комплект входят:
— сам квадрокоптер;
— аппаратура Devo 7;
— аккумулятор;
— ЗУ и БП к нему;
— комплект винтов (основной);
— тренерский шнурок;
— шестигранник и ключ;
— инструкция для быстрого старта и диск с дополнительными материалами.

Walkera Runner 250
Давайте рассмотрим Гонщика поближе. Рама квадрокоптера композиционная, пластины из набора углеродной и стеклоткани. Все ее элементы вырезаны на ЧПУ станках. Электронные компоненты модульные (приемник, полетный контроллер, регуляторы скорости, видео камера, видео передатчик).

Дополнительные ракурсы






По компоновке. Все основные элементы квадрокоптера, расположены на верхнем ярусе. Его основой является плата питания (Power Board). К ней в свою очередь крепятся остальные элементы конструкции и устанавливаются электронные компоненты.
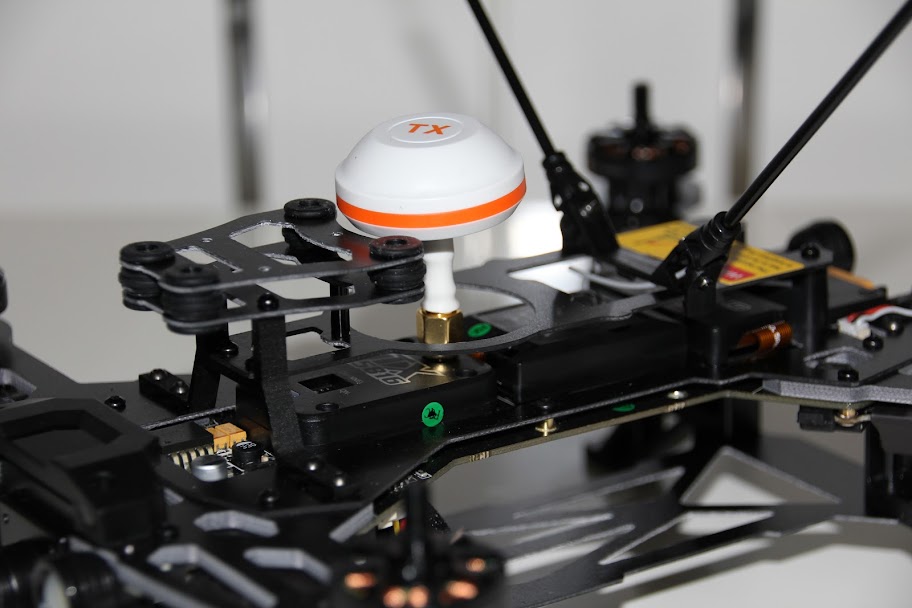
Модульная конструкция позволяет снять/установить любой элемент квадрокоптера. Например луч или регулятор скорости мотора, сам мотор. При этом не требуется пайка, все собрано на разъемах.

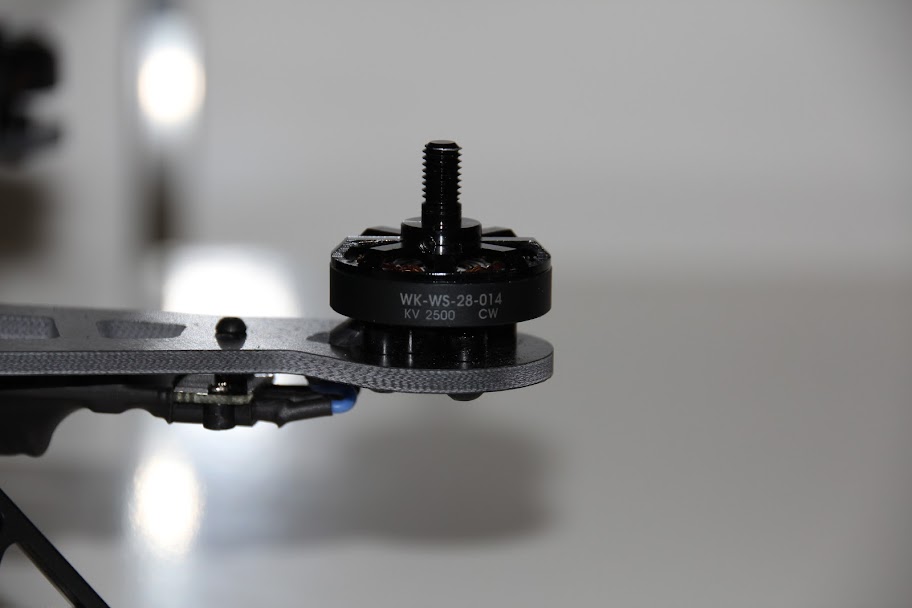
Бесколлекторные моторы WK-WS-28-014 KV2500. Сделаны очень качественно. Валы у них с резьбой, два мотора с левой и два с правой, для установки самозатягивающихся винтов.
Комплектуется квадрокоптер аппаратурой Devo. Это стандартная аппаратура для продукции фирмы Walkera. В данном случае это Devo 7, семи канальная, 2.4ГГц радио аппаратура с цифровым управлением.

Дополнительные ракурсы







Инструкция для нее идет на комплектном CD диске, для удобства выложил на файлообменник — Manual of DEVO-7.pdf (ENG) или на русском — Devo7_UserManual_RU.
Аппаратура полноценная, прочитать инструкцию, настоятельно рекомендуется. Хотя, так как это RTF «РедиТуФлай» товар, пульт уже настроен на данный квадрокоптер. В настройках аппаратуры прописана модель RUNER c базовыми настройками.
Силовой аккумулятор литий-полимерный, трех баночный, на 2200mah. Разъем для подключения XT60.

Так же в комплекте есть зарядное устройство. Оно позволяет заряжать двух и трех баночные аккумуляторы.

Зарядный ток у нее 0.8А, это очень мало для такого аккумулятора, заряжаться будет около трех часов. Желательно пользоваться более продвинутыми зарядными устройствами, например тем же iMax-B6.
В комплекте к нему, идет блок питания на 15В, 1.0А.

Винты, шнурок, ключики, подкладка под аккумулятор.

К сожалению всего один комплект винтов, запасных нет. Этого очень мало, можно сразу заказывать их целую пачку, расходятся они очень быстро, даже у опытных пилотов.
Предполетная подготовка не сложная. Требуется выполнить не сложные действия:
— зарядить аккумулятор;
— установить винты, перепутать их не возможно, винт просто не накрутится на вал мотора;
— вставить аккумулятор, закрепить его стяжкой;
— подключить к разъему, квадрокоптер просигналит моторами, замигают красные огни;
— включить аппаратуру, в течении 5 секунд произойдет коннект и красные огни на квадрике погаснут;
— готов к полету.
Для разблокировки моторов нужно сдвинуть стик газа вниз и влево, для блокировки — вниз и вправо.
Все эти действия описаны и показаны на иллюстрациях в краткой инструкции.

Облет
Аккумулятор заряжен, беру пульт и «Ранера» и во двор на облет.
Полетел сразу, немного оттриммировал и он полетел как надо. По умолчанию настроены довольно большие расходы, а квадрик очень шустрый. Успел попробовать реакцию на стики, вращение и ускорение на вертикальном взлете. Потом, «Черт меня дернул», проверить полетные режимы и дело закончилось плачевно.
Ни кто же не предупредил, что в 3D режиме он летает совсем не так как коллекторные квадрики. Вместо ожидаемого флипа, он просто перевернулся вверх ногами, к чему я был совсем не готов. Результат — жесткий удар об планету с высоты.
Повреждения не тотальные, сломалась нижняя пластина и два винта.

Скорее всего закажу новые детали, а пока они будут ехать, сделаю самодельную из текстолита.
Так, что — Продолжение следует!
Полезные ссылки
10 коментарів
ЗЫ квадрик классный но меня прут самолёты.