

-
 OleksandrBerezoviy,
OleksandrBerezoviy,
- 930
OMNIBUS F4 Nano v3 + Ori32 4in1 ESC 4x25A=тестируем в сборке квадрокоптера


|
|
Товарищу приехало много новых квадрокоптерских игрушек и мы их вместе проверяли в деле. В целом, в заказе были и другие детальки, обзор их будет тоже вскоре.

О чем будем говорить в этом обзоре — OMNIBUS F4 Nano v3 https://store.myairbot.com/flight-controller/omnibus-f3-f4/omnibusf4nanov3.html - $35.99
- 2-6s direct input (adaptor to connect to Wave 4in1 ESC providing power and ESC signal connection (note Wave is 2-4s))Ori32 4in1 ESC 4x25A — https://store.myairbot.com/esc/4in1-esc/ori324in14x25a.html - $44.99
— MPU6000 gyro connected by SPI for low noise, clean, high frequency gyro samples
— BMP280 Barrometer to enable altitude hold
— Betaflight OSD
— Onboard voltage sensor
— On board 5v regulator, components rated to 2A — recomended 1A max to prevent heat build up)
— built in L-C filter to provide clean power to FPV kit
— STM32 F405 MCU running betaflight 3.2
— pin headers for SBUS/PPM input
— output for 4 motors on JST-SH 1.0 8pin plug connects to Airbot Wave 4in1 ESC (The Option 8pin 4in1 Cable)
— 25x25mm (20x20mm M3 mount holes)
- 32bit ESC with BLHELI32 firmware
- Supports 2-4S lipo input
- 4PWM input
- Voltage output (VBAT)
- NO BEC
- Supports oneshot / Multishot / Dshot PWM
- Mount holes 20x20mm
- Supports damped light

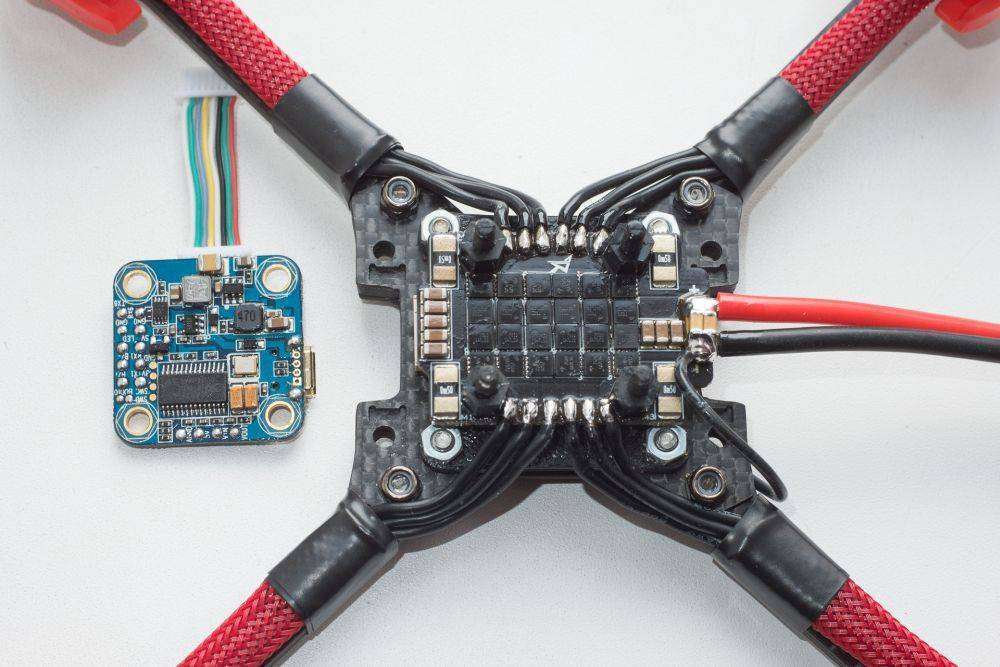
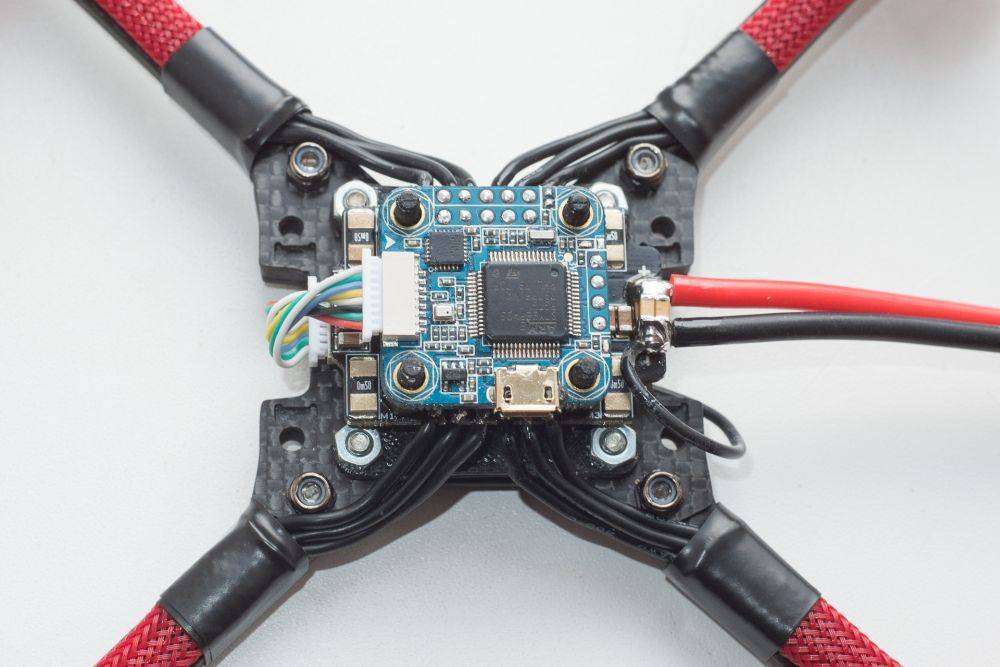
При монтаже комплекта не было никаких проблем, просто две платы соединяются одним кабелем ( правда кабель нужно докупать отдельно, он не идет в комплекте ни с контролером ни регулятором). Также с контролером и регулятором поставляется документация в бумажном виде, с чертежом платы и расписанными контактами, есть команды для переназначения выходов моторов так как провода в кабеле идут все подряд а моторы могут подключатся по разному в зависимости от установки платы контролера. Если нет желания возится с переназначением выходов каждый раз при новой прошивке то можно провода вынуть с пластиковой оправы и вставить в нужном порядке самостоятельно.

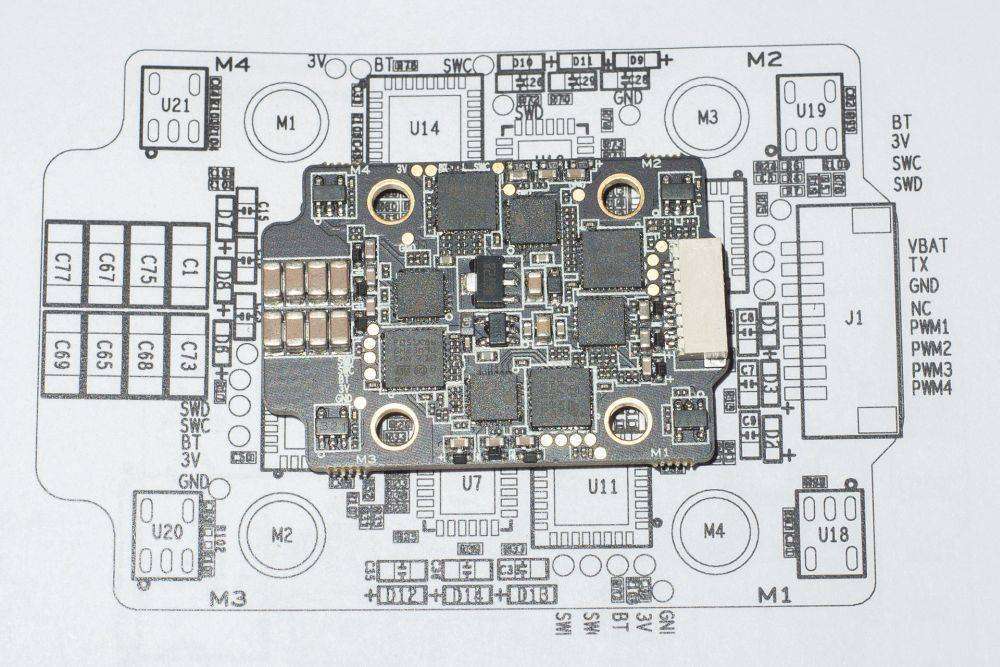
OMNIBUS F4 Nano v3 — полетный контролер на процессоре STM32F405, со встроенным OSD чипом АТ7456Е, гироскопом МРU6000, барометр ВМР280 , импульсным стабилизатором 5 В 1А и LC-фильтром по питанию, крепежные отверстия 3мм с шагом 20 х 20 мм.
Плюсы:
— маленький размер при функционале больших контролеров
— встроенное OSD
— встроенный барометр
— монтажные отверстия 3мм
Минусы:
— слабый стабилизатор на 5В, хоть и заявлен максимальный ток 1А, но уже при токах 0,5-0,6А напряжение падает до 4,5 В, при нагрузке 1А напряжение падает почти до 4 В, что может сказаться на стабильности работы приемника управления или системы FPV.
— кабель для подключения не идет в комплекте, его нужно не забыть заказать отдельно.
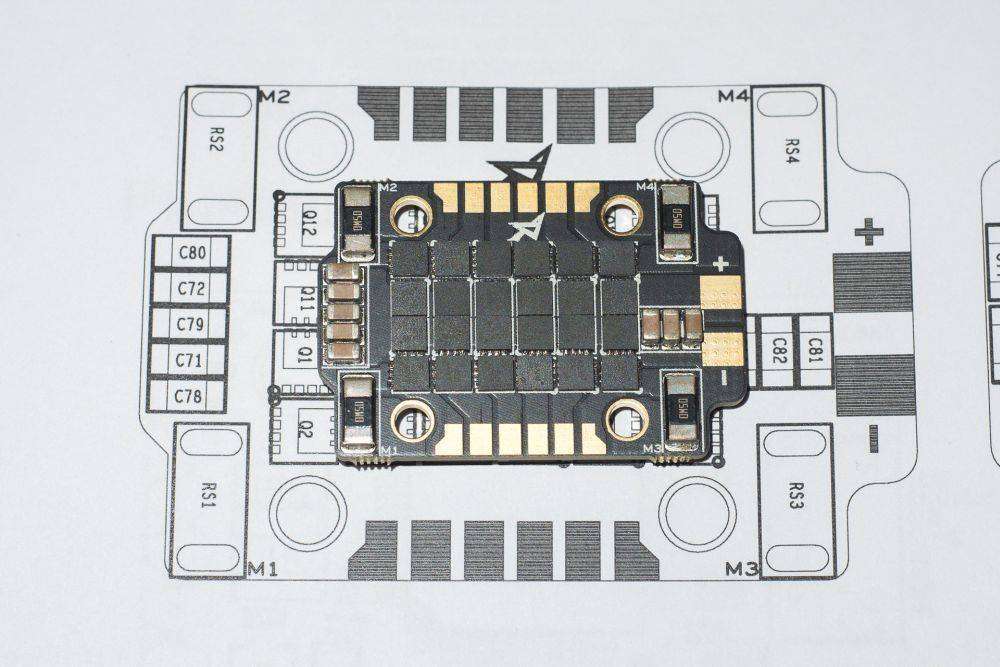
Ori32 4in1 ESC 4x25A — регулятор скорости безколекторных моторов работающий на прошивке BLHeli32, имеет 4 канала по 25А, крепежные отверстия 3мм с шагом 20 х 20 мм. На плате установлены датчики тока на каждый канал по отдельности, что дает возможность устанавливать в настройках максимальный ток на каждый мотор независимо, при этом регулятор просто не даст увеличивать больше обороты при достижении установленного тока на мотор. Так что в полете при резких маневрах и перегрузках просто будет ограничение мощности моторов а не выход со строя регулятора или отключение мотора.
Плюсы:
— большой рабочий ток при малых размерах
— датчик тока на каждый канал
— монтажные отвествия 3мм
Минусы:
— нет встроенного стабилизатора 5в для питания полетных контролеров других производителей которые питаются только от 5В.
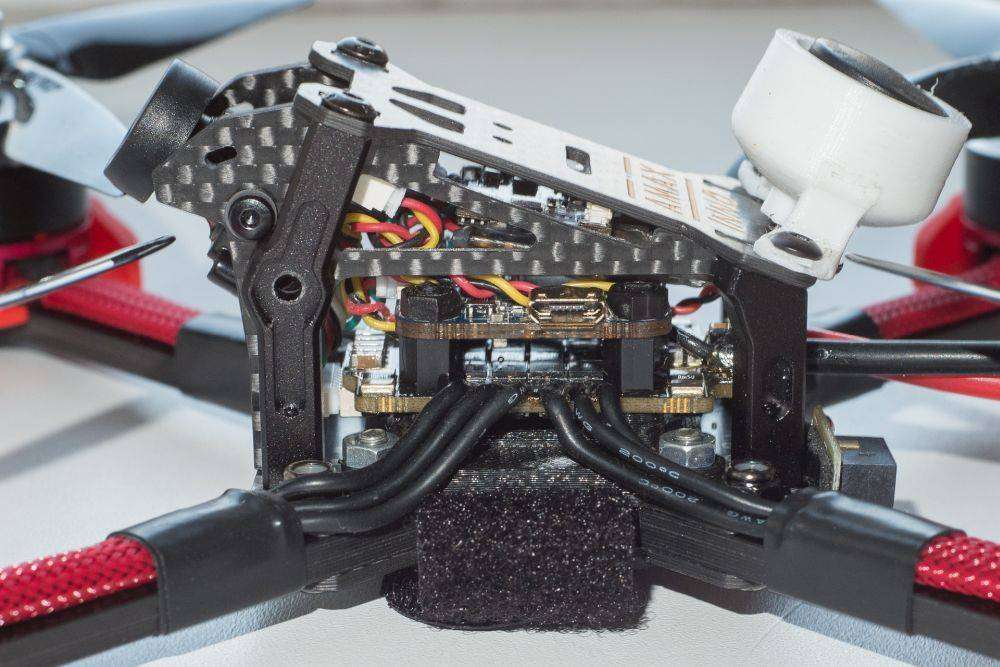

Ну и в сборке
рама — AMAXinno Nano 5 (185mm)
контролер — OMNIBUS F4 Nano v3
регуляторы — Ori32 4in1 ESC 4x25A
моторы — KINGKONG GT2205 2700KV + Cyclone T5051C
камера — Foxeer Arrow Micro
видеопередатчик — AKK Nano 25/200mW 5.8GHZ
приемник управления — Radiolink R6DS


Но все это ниочем без видео. А видео снято при помощи AOMWAY Commander V1 5.8GHz Dual Diversity (обычный аналоговый сигнал с низким разрешением). С другой стороны это отлично подойдет для демонстрации сигнала OSD с контролера, все циферки и буковки это уже контролер накладывает на картинку с камеры. Функционал позволяет выводить кучу всякой информации с контролера, на гоночных нужно только напряжение и время =)
Комментариев нет